Tempo-relative timing for MSP LFO control
The MSP phasor~ object is frequently used as a low-frequency control signal for audio. Because it is often used to control other signals over a specific period of time, phasor~ can use tempo-relative timing, too. The frequency (rate) of a phasor~ is normally specified in Hertz, but you can alternatively give phasor~ a time interval, using tempo-relative time units, and it will use the inverse of that to determine its frequency.
For example, if I wanted a phasor~ to ramp from 0 to 1 every 500 milliseconds, I would specify a frequency of 2 Hz so that it will complete one cycle every 1/2 second. I could alternatively give it a tempo-relative time unit, such as 4n, which—if we assume the default transport tempo of 120 bpm—equals 1/2 second (500 ms), and phasor~ will interpret that as its period, and use the inverse of that (2/1) to determine its frequency. If the tempo of the transport changes, phasor~ will revise its frequency accordingly. This works even if the transport is not running.
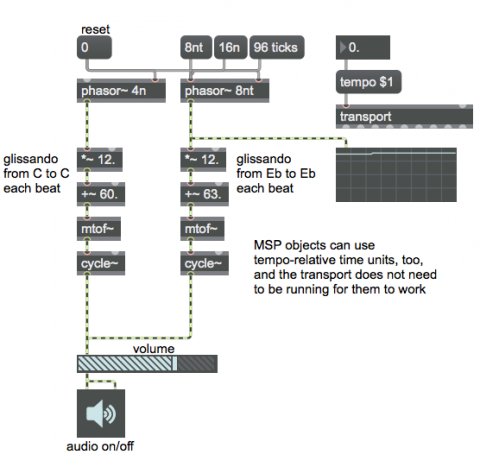
In this example patch, phasor~ is being used to control a pitch glissando of one octave, which then gets translated by mtof into frequency for a cycle~ object. The phasor~ on the left completes one sweep per beat, while the phasor~ on the right completes three sweeps per beat (once for each eighth-note triplet). If you change the tempo of the transport, the phasor~ objects adjust their frequency to match the new tempo, thus staying in sync. If you provide the phasor~ on the right with a new time interval—a sixteenth note or a quintuplet sixteenth note (which equals 96 ticks)—it will change its rate. Unless that change were to happen exactly on the beat, though, the phasor~ on the right will likely no longer be in phase with the phasor~ on the left. So if you want them to remain in phase it's a good idea either to trigger such a change exactly on the beat or to reset the phase of both phasor~s by sending a phase value in their right inlets.
Other MSP objects don't understand tempo-relative time units the way that phasor~ does, but there's usually a way to sync them to the transport's tempo if you want to. For example, if you want use tempo-relative timings for the rate of a cycle~ object that you're using as a LFO, you can just set the frequency of the cycle~ to 0, and then drive it by connecting the output of a phasor~ to its right inlet. If you want the delay time of a tapout~ object to be exactly the same interval as a tempo-relative time unit, you can use translate to convert that time unit into milliseconds.